

08.07.2019
5 minutes de lecture




L’équipe IFPEN du projet « Contrôle des systèmes houlomoteurs », porté par Paolino Tona, a gagné le trophée de la première phase de la compétition WECCCOMP (WEC Control Competition), remis lors de la 38th International Conference on Ocean, Offshore & Arctic Engineering.
La compétition, organisée par le COER (Irlande), le NREL, les Sandia National Laboratories (États-Unis) et l’université d’Aalborg (Danemark), consiste à concevoir un système de contrôle pour maximiser la production électrique d’un prototype de machine convertissant l’énergie des vagues, d’abord en simulation puis expérimentalement en bassin. Ce prix confirme l’excellence de la R&I d’IFPEN sur le contrôle houlomoteur, qui joue un rôle crucial dans le déploiement industriel de ces systèmes.
Grâce à un énorme potentiel brut (estimé entre 18 000 et 31 000 TWh/an dans le monde1), la récupération de l’énergie des vagues est considérée comme une solution technologique prometteuse pouvant couvrir, à terme, 5 à 20 % de la consommation électrique mondiale. Il s’agit d’une forme d’énergie très intéressante du point de vue de la diversification du mix énergétique à double titre :
- sa disponibilité est relativement facile à prédire, avec des prévisions des niveaux moyens de puissance disponibles 1 à 2 jours à l’avance ;
- son intermittence est différente de celle d’autres énergies renouvelables, comme le solaire et l’éolien. Cette technologie exploite, en effet, les vagues océaniques, formées à des milliers de kilomètres de distance, qui ne faiblissent pas pendant la nuit et dont l’intensité est indépendante des vents locaux.
Dans l’espoir d’exploiter ce potentiel, des centaines de concepts de machines permettant de récupérer l’énergie des vagues - convertisseurs houlomoteurs ou WEC (wave energy converters) - ont été proposés et développés à partir des années 1970.
Certaines d’entre elles ont permis la réalisation de prototypes qui ont été testés en mer et ont même produit de l’électricité sur des périodes plus ou moins longues. Toutefois, la viabilité économique et la fiabilité à long terme des dispositifs houlomoteurs doivent encore être prouvées. Une forte réduction des coûts actuels, que la Commission Européenne estime à au moins 75 % à horizon 20252, sera nécessaire pour que l’énergie houlomotrice devienne compétitive par rapport à d’autres formes d’énergie renouvelable.
Le contrôle actif des systèmes houlomoteurs constitue l’un des enjeux essentiels pour améliorer la rentabilité de l’énergie des vagues.
Depuis plusieurs années, IFPEN travaille à développer des solutions répondant à un ensemble de problèmes d’estimation et commande pour les systèmes houlomoteurs en vue de satisfaire les besoins exprimés par certains partenaires industriels.
IFPEN a notamment développé des chaînes de commande complètes, conçues plus particulièrement pour des convertisseurs ponctuels oscillants, tels que la machine Wavestar. Celle-ci est constituée d’un ensemble de 20 flotteurs hémisphériques (de 6 mètres de diamètre, pour une centrale pouvant produire 1 MW) reliés à une structure fixe par des bras articulés abritant les PTO (convertisseurs secondaires ou power-take off).
La plus intéressante pour ce type de systèmes, est une commande prédictive par modèle (MPC) non linéaire3.4, dont le schéma est représenté ci-après.
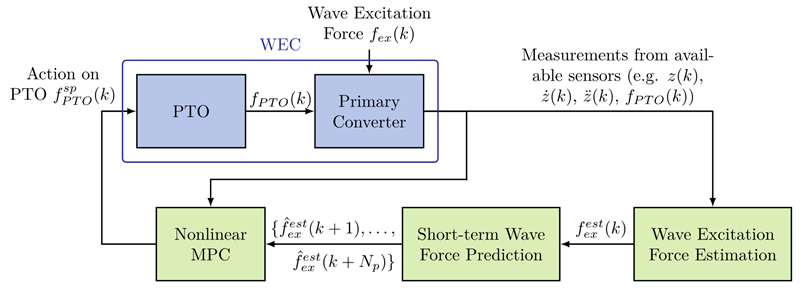
Elle est basée sur :
• des algorithmes d’estimation en ligne de la force d’excitation de la houle à partir de mesures (ou estimations) de la position et de la vitesse du flotteur et de la force appliquée par le PTO5 ;
• des algorithmes de prédiction à court terme des valeurs futures force d’excitation de la houle, à partir d’une série temporelle des valeurs passées6 ;
• des algorithmes de commande prédictive par des modèle capables de tourner en temps-réel, prenant en compte :
- un rendement non idéal du PTO, différent en mode moteur et générateur ;
- des dynamiques simples (linéaires) du PTO ;
- des contraintes (saturation) sur la force que le PTO peut délivrer.
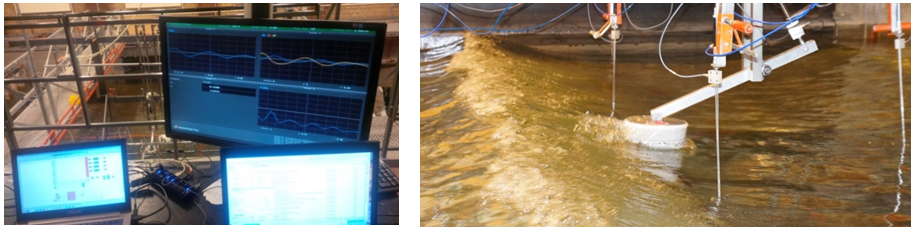
Cette chaîne de commande a été validée par des tests en bassin à l’université d’Aalborg, sur un modèle de flotteur Wavestar à petite échelle, soumis à l’action de différentes houles irrégulières.
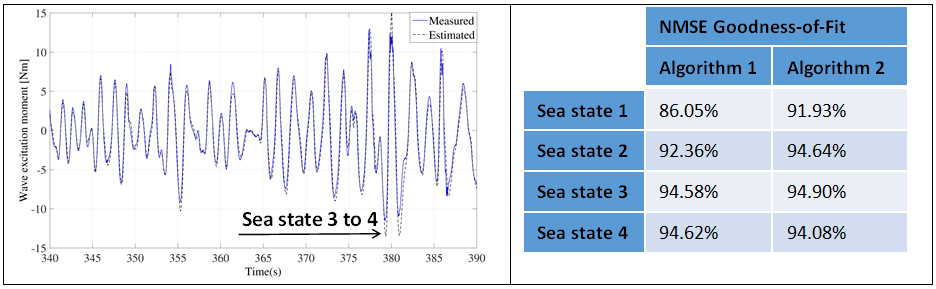
Des gains de production d’énergie de l’ordre de 20 % ont été constatés pour les houles les plus représentatives, par rapport au contrôle de référence proposé initialement. Ces résultats encourageants sont imputables à la bonne performance de chaque brique de la chaîne. C’est le cas par exemple avec deux algorithmes développés pour l’estimation de la force d’excitation de la vague : le premier basé sur un filtre de Kalman avec un modèle de marche aléatoire, le second sur un estimateur à entrée inconnue et à horizon glissant. Leurs résultats ne montrent aucun décalage significatif par rapport à la force d’excitation mesurée dans un essai dédié, à flotteur bloqué et ce, même dans un état de mer changeant.
Dans l’optique de développer une approche modulaire, avec des systèmes de commande de complexité différente, adaptables à différentes machines, IFPEN a également proposé une chaîne de commande, plus simple, dite commande PI adaptative7.
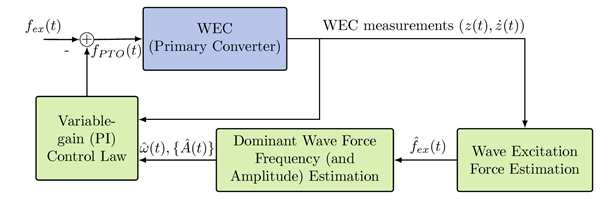
Elle est basée sur :
• les algorithmes d’estimation en ligne de la force d’excitation de la houle (les mêmes que pour la MPC) ;
• un algorithme d’estimation en ligne de la fréquence dominante de la force d’excitation de la houle8 ;
• des courbes de gains optimaux fonction de la fréquence dominante, pré-calculés hors ligne en considérant un rendement non idéal du PTO.
Cette approche, qui peut facilement être appliquée à la majorité des machines houlomotrices, permet d’améliorer la récupération d’au moins 10 % par rapport au contrôle de référence dans des états de mer constants et potentiellement bien plus dans des états évolutifs.
A noter que ces travaux ont également débouché sur un important résultat complémentaire, en restreignant un principe de la théorie classique de la commande hydrodynamique. Celui-ci indique que la vitesse optimale du convertisseur primaire doit être en phase avec la force d’excitation de la houle pour maximiser la production d’énergie. Or, ceci est faux lorsque le rendement de conversion du PTO n’est pas idéal (c’est-à-dire inférieur à 100 %).
Même si des pistes de recherche restent à explorer pour permettre au contrôle-commande de rendre les systèmes houlomoteurs pleinement viables économiquement, les travaux menés à IFPEN ont permis des avancées significatives en proposant des solutions efficaces et d’ores et déjà implémentables. Ceci en fait aujourd’hui un acteur reconnu et à la pointe dans ce domaine9.
Dans le cadre d’un projet collaboratif ADEME, IFPEN travaille actuellement sur l’optimisation de la production énergétique du convertisseur S3™ à polymères électro-actifs de SBM Offshore, en développant des algorithmes de prédiction à court terme de la déformation de la paroi sous l’action de la houle. On estime que ces algorithmes, couplés à un contrôle semi-actif des cycles de charge développé par SBM, peuvent permettre d’augmenter de manière très importante la production énergétique du convertisseur.

Contact IFPEN : Paolino Tona
Principe de fonctionnement et contrôle des dispositifs houlomoteursMême s’il n’y a pas encore de convergence technologique, le principe de fonctionnement de base est le même pour la plupart des dispositifs houlomoteurs : l’énergie est récupérée à partir d’un mouvement oscillatoire ou circulaire induit par les vagues (Figure 1). .PNG)
Dans un WEC, il y a un convertisseur primaire qui est généralement un corps oscillant (ou un ensemble de corps oscillants) qui récolte de l'énergie mécanique à partir de l'interaction hydrodynamique avec les ondes. L'énergie mécanique est convertie en électricité (ou une autre forme d'énergie utilisable) lorsque le système de prise de puissance – convertisseur secondaire ou PTO (power-take off) – applique une force (ou un ensemble de forces) opposée au mouvement du convertisseur primaire. Dans certains WEC, la force appliquée par le PTO est, par conception, générée de manière passive. Mais, pour de nombreux WEC, il est nécessaire de concevoir un système de contrôle actif, qui permet de demander au PTO d'appliquer des forces qui modifient la réponse dynamique du convertisseur primaire aux sollicitations par les vagues. Ce contrôle actif peut être utilisé pour améliorer la récupération et / ou réduire les efforts exercés sur les composants du WEC. |
1 Mork, G., Barstow, S., Pontes, M.T. and Kabuth, A., 2010. “Assessing the global wave energy potential”. In: Proceedings of OMAE2010 (ASME), 29th OMAE Conference, Shanghai, China, China, 6-10 June 2010.
2 European Commission. “European Commission: SET Plan – Declaration of Intent on Strategic Targets in the context of an Initiative for Global Leadership in Ocean Energy”, 2016.
3 Tona, P., Nguyen, H.-N., Sabiron, G., and Creff, Y., 2015. “An efficiency-aware model predictive control strategy for a heaving buoy wave energy converter”. Proc. EWTEC2015, Nantes, FR
4 Nguyen, H.-N., Sabiron, G., Tona, P., M. Kramer, Vidal Sánchez, E., 2016. “Experimental validation of a nonlinear Model Predictive Control strategy for a wave energy converter prototype”. Proc. OMAE2016, Busan, KR
5 Nguyen, H.-N. and Tona, “Wave excitation force estimation for wave energy converters of the point absorber type”, IEEE Transactions on Control Systems Technology, DOI: 10.1109/TCST.2017.2747508 , 2018
6 Nguyen, H.-N. and Tona, P., “Short-term wave force prediction for wave energy converter control, Control Engineering Practice”, vol. 75, pp. 26–37, 2018
7 Nguyen, H.-N and Tona, P., “Continuously Adaptive PI-Control of Wave Energy Converters under Irregular Sea-State Conditions”, In Proceedings of the European Wave and Tidal Energy Conference (EWTEC) 2017
8 Nguyen, H.-N., Tona, P., and Sabiron, G., Dominant wave frequency and amplitude estimation for adaptive control of wave energy converters, in MTS/IEEE OCEANS 2017 Conference, Aberdeen, U.K., 1978
9 Magagna, D., Margheritini, L. “Workshop on identification of future emerging technologies in the ocean energy sector”, JRC Conference and Workshop Report, 2018
10 Ocean Energy Discussion Paper (2016), a contribution of the OES to the OECD study “The Future of the Ocean Economy: Exploring the prospects for emerging ocean industries to 2030”
11 Wave Energy Scotland (WES), “Control Requirements for Wave Energy Converters Landscaping Study”, Technical report ref. WES_LS04_ER_Controls, WES, July 2016.
12 Korde, U. A. and Ringwood, J. “Hydrodynamic Control of Wave Energy Devices”. Cambridge University Press, 2016.
13 Falnes, J., “A review of wave-energy extraction”, Marine Structures, 20(4):185{201}, 2007
Vous serez aussi intéressé par
