

24.09.2021
3 minutes de lecture




Les algorithmes sont-ils la solution idéale pour rendre nos autoroutes plus sûres en déterminant les meilleures trajectoires pour les véhicules ? Un projet de fin d’études réalisé à IFP School par un groupe d’étudiants du programme « Powertrain engineering », en collaboration avec Stellantis, permet de le penser. Des résultats très prometteurs ouvrent la voie à un futur déploiement de la méthodologie mise en œuvre pour accompagner les automobilistes et les inciter à rejoindre de manière fluide et automatisée un peloton existant ou en train de se former.
Pour les automobilistes, le recours à l’automatisation permet d’optimiser le trafic autoroutier et de le fluidifier tout en minimisant l’énergie consommée.
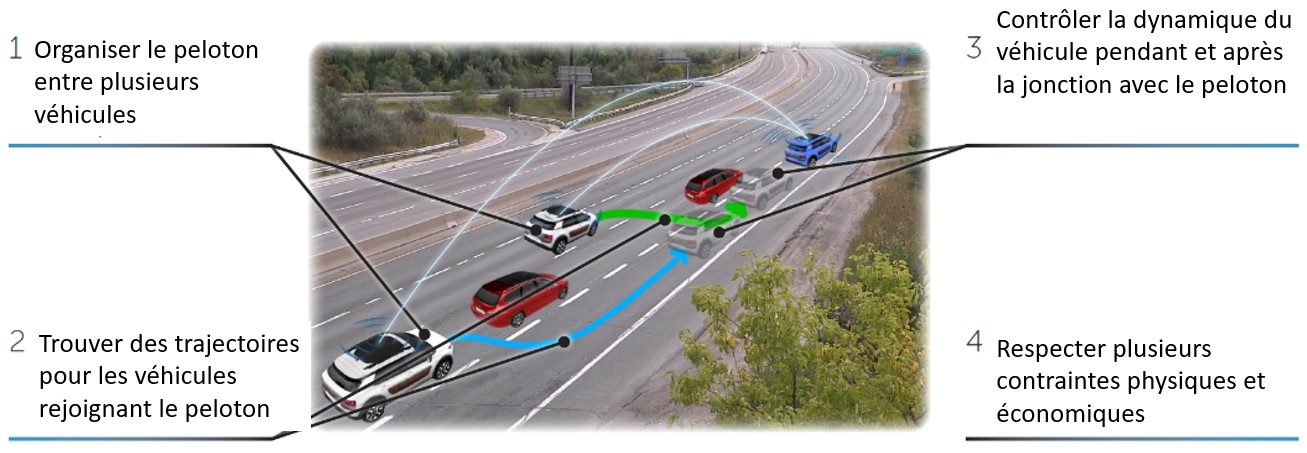
Dans ce contexte des systèmes autoroutiers automatisés (AHS), la planification de trajectoire permet à un véhicule de rejoindre automatiquement un peloton déjà constitué avec un cheminement optimisé et « robuste » vis-à-vis des obstacles incertains du trafic sur ces voies à grande circulation (Fig 1).
Cette problématique d’insertion dans le trafic a fait l’objet d’un travail à IFP School1, dans le cadre d’un projet de fin d’études du programme « Powertrain engineering », co-encadré par un intervenant de Stellantis, partenaire industriel.
Une approche originale combinant commande prédictive et algorithme…
Pour mener à bien ces travaux, deux outils ont été utilisés conjointement :
- la commande prédictive par modèle (MPC2) pour l'optimisation de la trajectoire planifiée,
- une variante de l'algorithme d’arbre aléatoire à exploration rapide (RRT3) pour la formation de pelotons.
Cette combinaison inédite a permis d’explorer efficacement l'espace des trajectoires possibles avec, à la clé, le développement de trajectoires lissées intégrant les contraintes de la « dynamique véhicule » et une capacité de mise en œuvre en temps réel. Cette dernière prend en compte à la fois la localisation et la cartographie par le biais de capteurs pertinents et d’un système de communication V2V4.
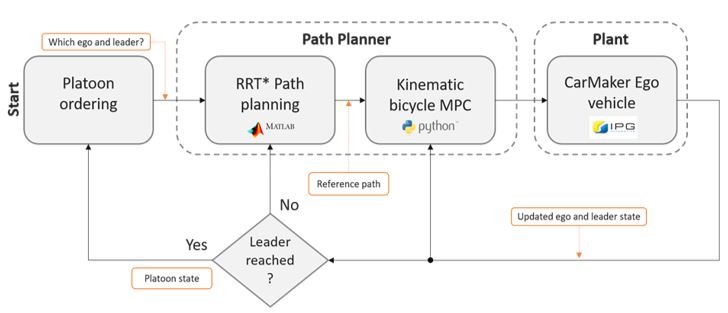
L'algorithme complet (Fig.2) a été testé sur divers scénarios afin de valider les bénéfices de la méthodologie proposée. A noter : bien que la validation a été effectuée dans un environnement de véhicules virtuels, sa mise en œuvre est indépendante de tout environnement spécifique.
… pour développer des trajectoires idéales.
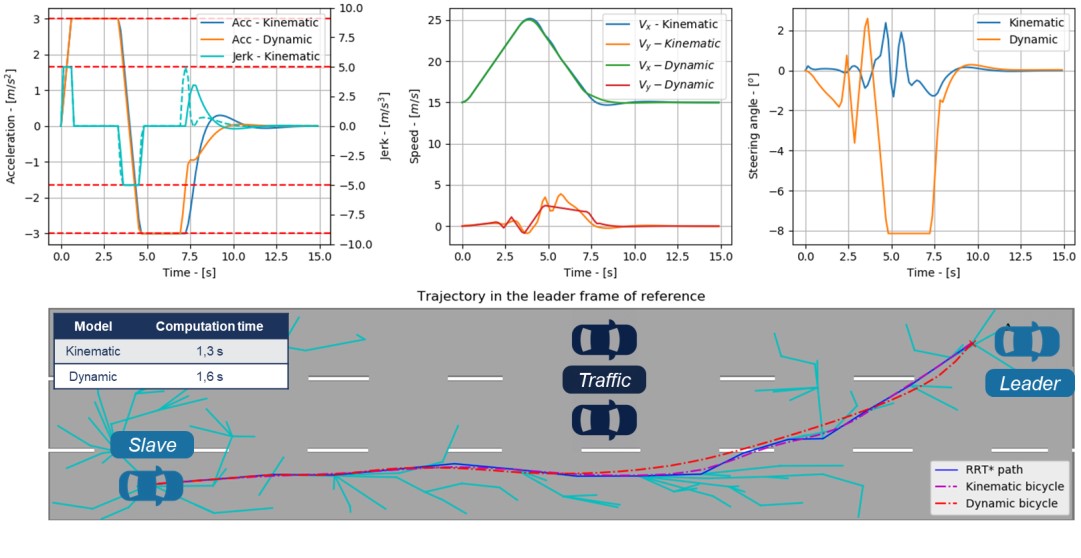
Les résultats indiquent qu'à partir d'un scénario initial donné (positions initiales quelconques des véhicules du peloton et de son "leader", ainsi que des objets du trafic), la méthode déployée permet de générer des trajectoires optimales à suivre pour que de nouveaux véhicules rejoignent un peloton ou se rejoignent pour en constituer un (Fig. 3).

Ce succès tient d’une part au fait que l’algorithme RTT est peu coûteux en temps de calcul, et d’autre part à la mise à jour à haute fréquence de la trajectoire par l’emploi d’un modèle de « type bicyclette » pour la prédiction MPC (Fig. 4).
Ces premiers résultats de simulation sont très encourageants quant à la capacité de mettre au point un planificateur de trajectoire en conditions réelles. Ils ouvrent la voie à de futures études pour prendre en compte les pratiques de conduite sur autoroute, telles que décrites dans le code la route, par exemple en ce qui concerne le changement de voie.
En route vers le perfectionnement des calculs
Par la suite, l’amélioration de l’utilisation de « l'informed-RRT6» devrait aboutir à une convergence plus rapide des calculs d’optimisation.
Ces travaux offrent de nouvelles perspectives pour les étudiants, les partenaires industriels et les enseignants-chercheurs d’IFP School. Il contribue également au développement des axes enseignement et recherche de la Chaire ECAV7.
1. Automated Highway Systems
2. Model-based predictive control : technique de commande avancée pour des systèmes complexes, utilisant un modèle dynamique du processus à l'intérieur du contrôleur en temps réel, pour anticiper le futur comportement du dispositif.
3. Rapidly-exploring Random Tree : algorithme conçu pour la recherche efficace d'espaces non convexes de haute dimension.
4. Vehicle-to-vehicle
5. Véhicules ne faisant pas partie du peloton
6. Méthode permettant d'échantillonner directement le sous-ensemble d'un problème de planification qui contient toutes les améliorations possibles d'une solution donnée.
7. ECAV : Electric Connected and Autonomous Vehicle for Smart Mobility
Contact scientifique : ouafae.el-ganaoui-mourlan@ifpen.fr
Références :
[1] Ouafae El Ganaoui-Mourlan, Stephane Camp, Thomas Hannagan, Vaibhav Arora, Martin De Neuville and Vaios Andreas Kousourna. Path Planning for Autonomous Platoon Formation. Sustainability 2021, 13, 4668. https://doi.org/10.3390/su13094668